A Robot-Free Bridge to Humanoid Whole-Body Skills
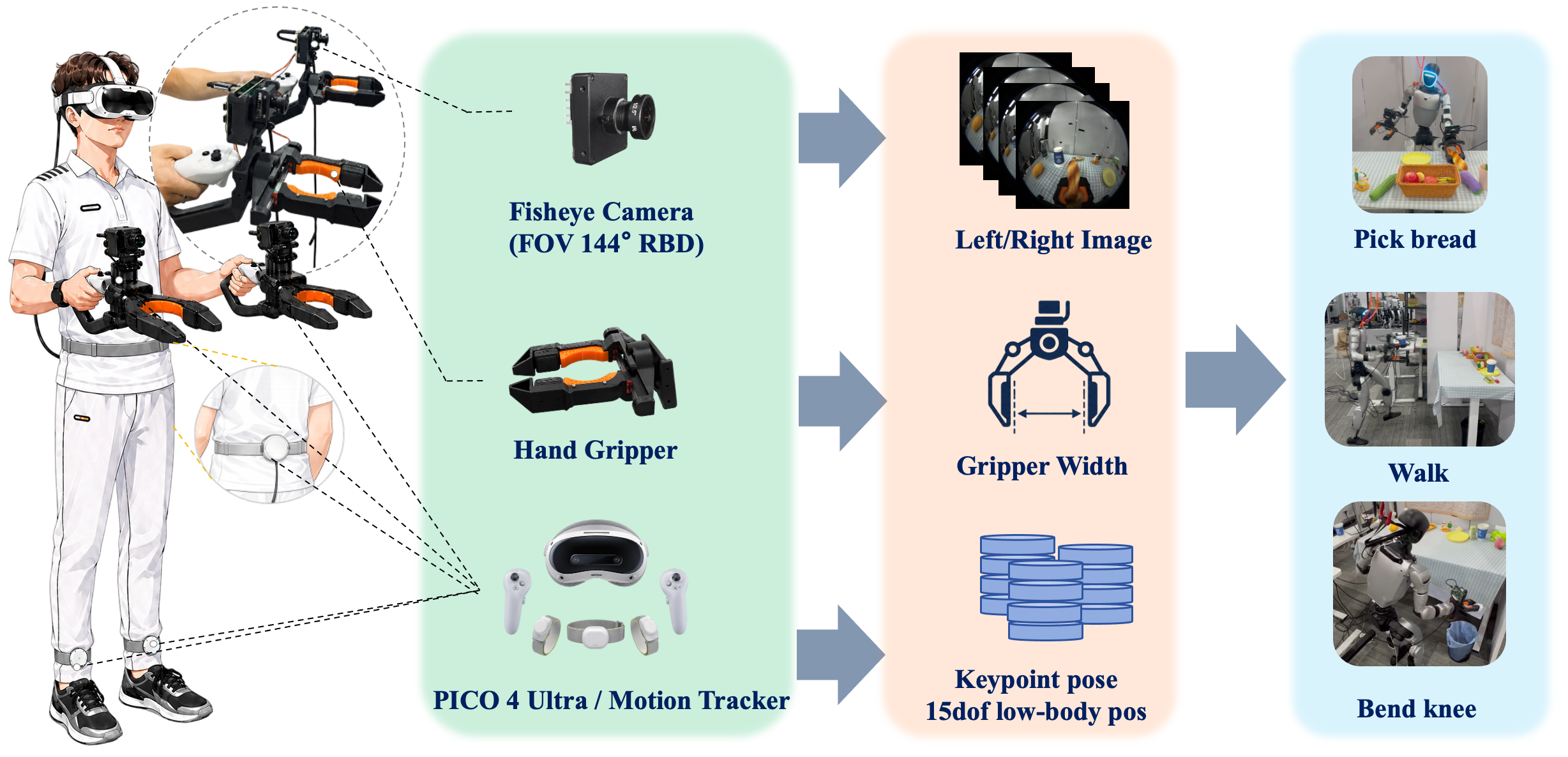
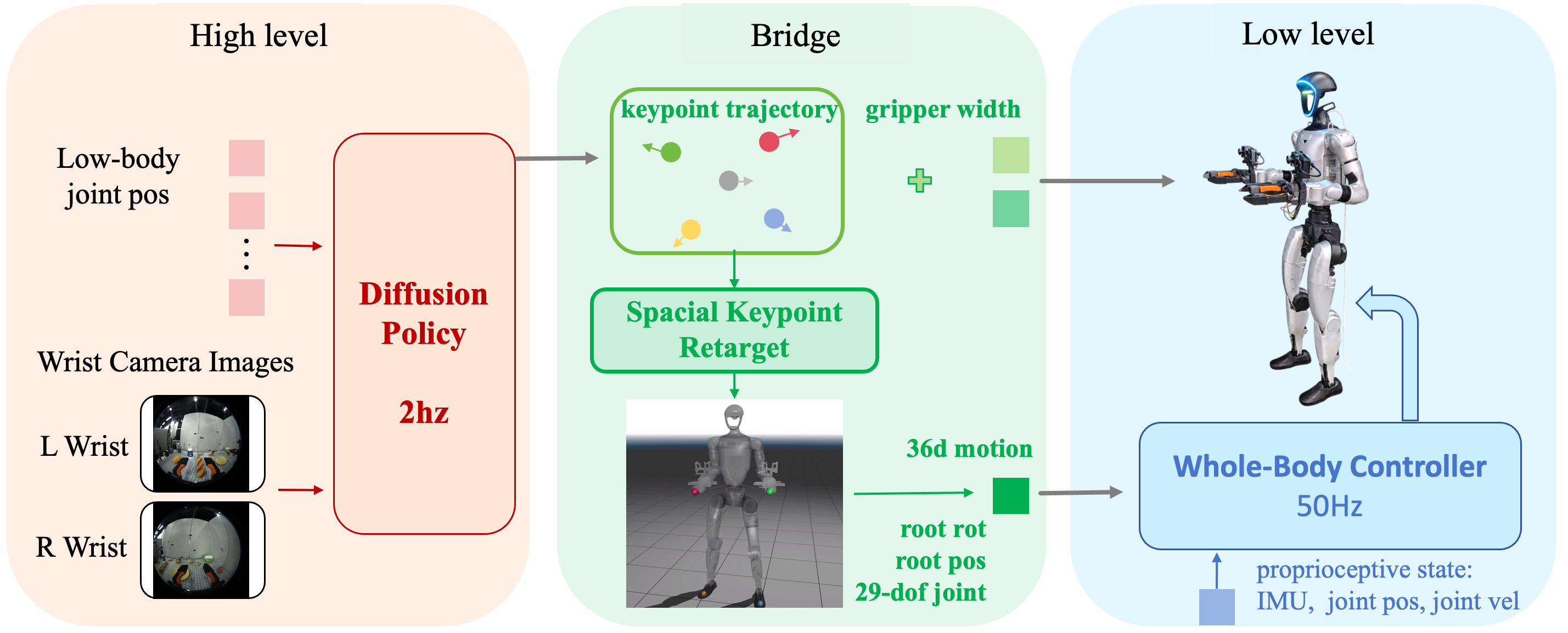
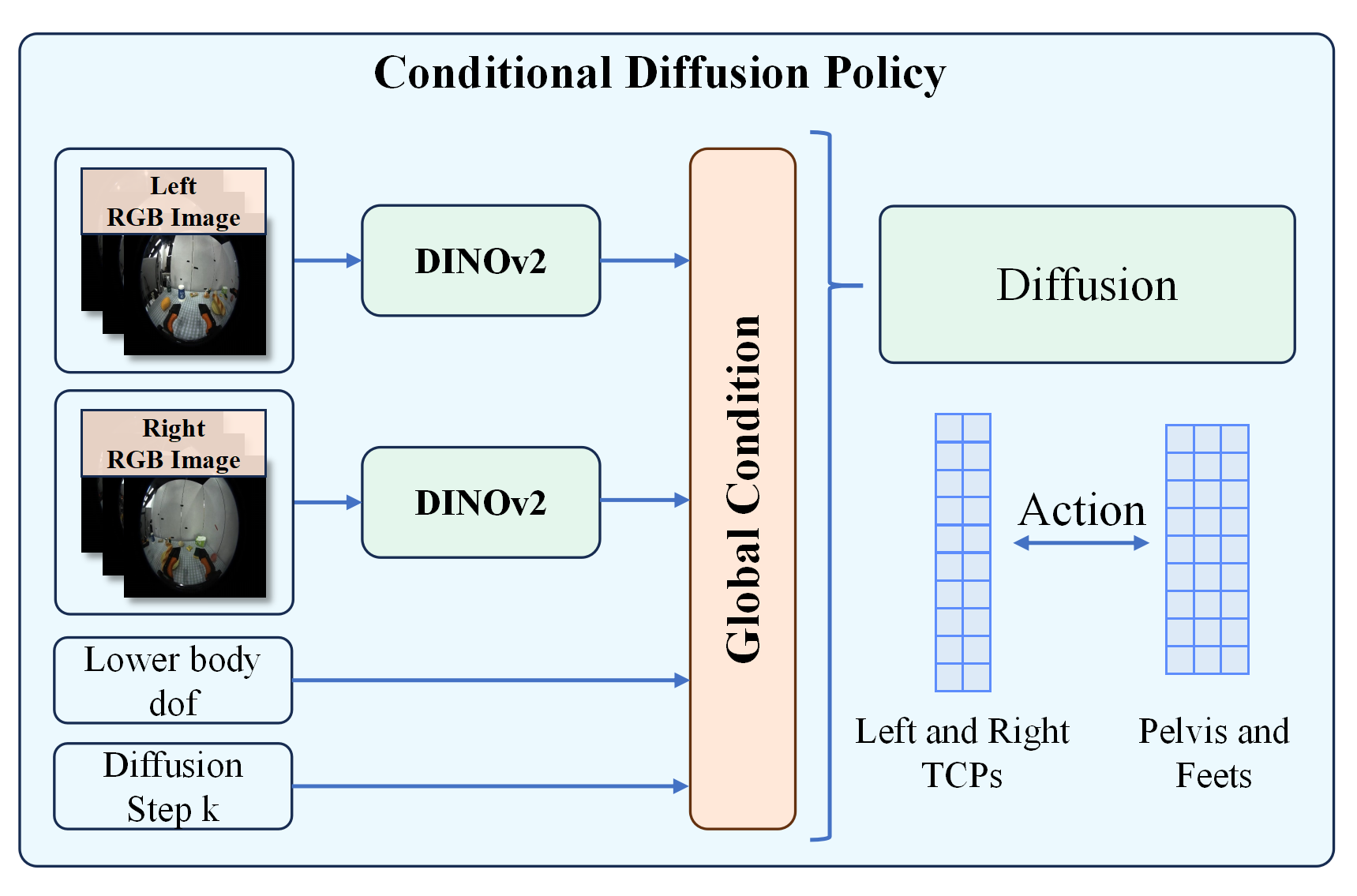
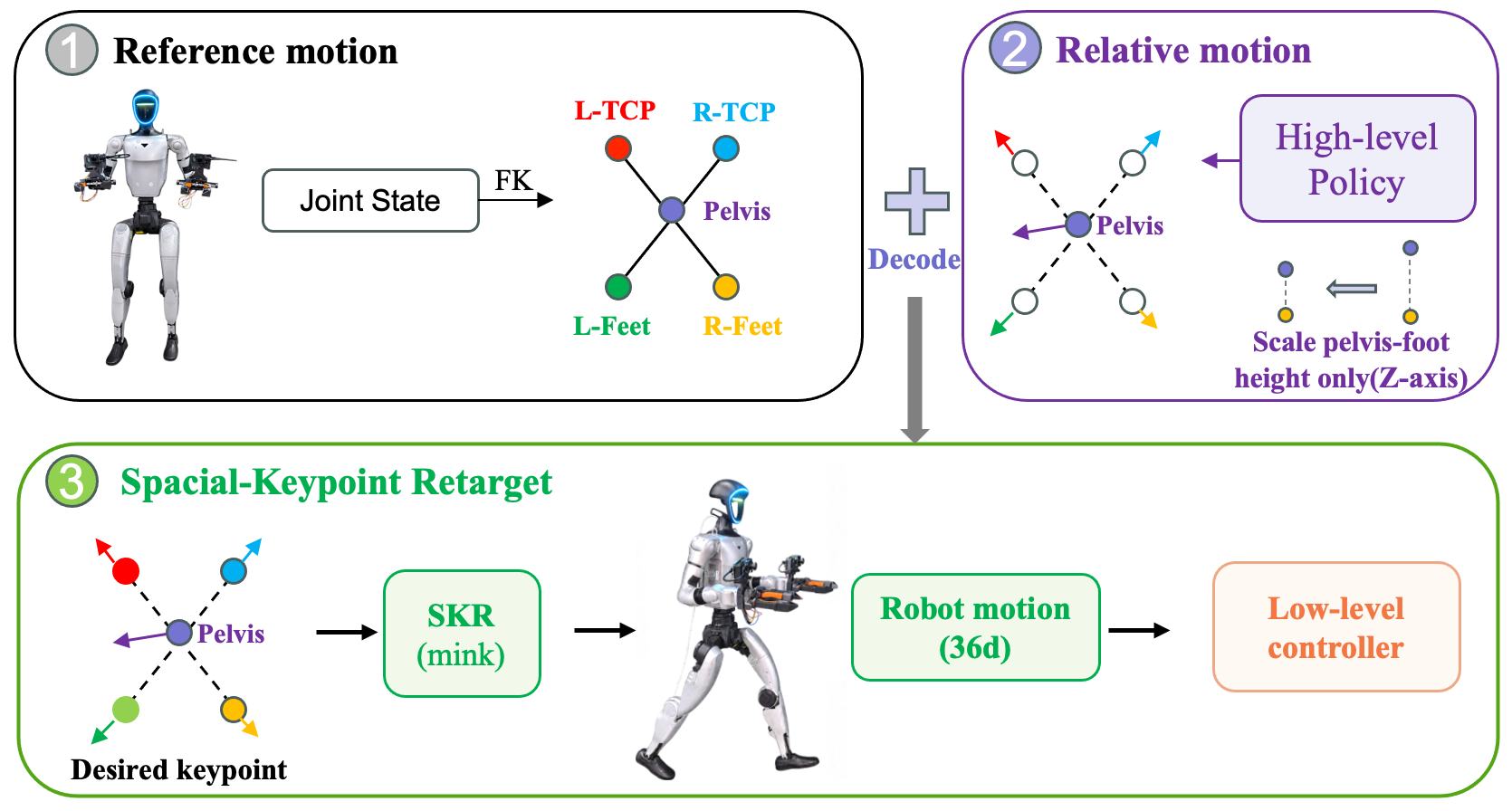
HumanoidUMI provides a robot-free data collection and learning framework for humanoid whole-body skills. Human demonstrations are collected with portable VR-UMI devices and represented as sparse task-relevant spatial keypoints. A high-level policy predicts future keypoint motions and gripper actions, Spatial Keypoint Retargeting converts them into feasible humanoid whole-body references, and a low-level whole-body controller executes the motion with balance and stability.
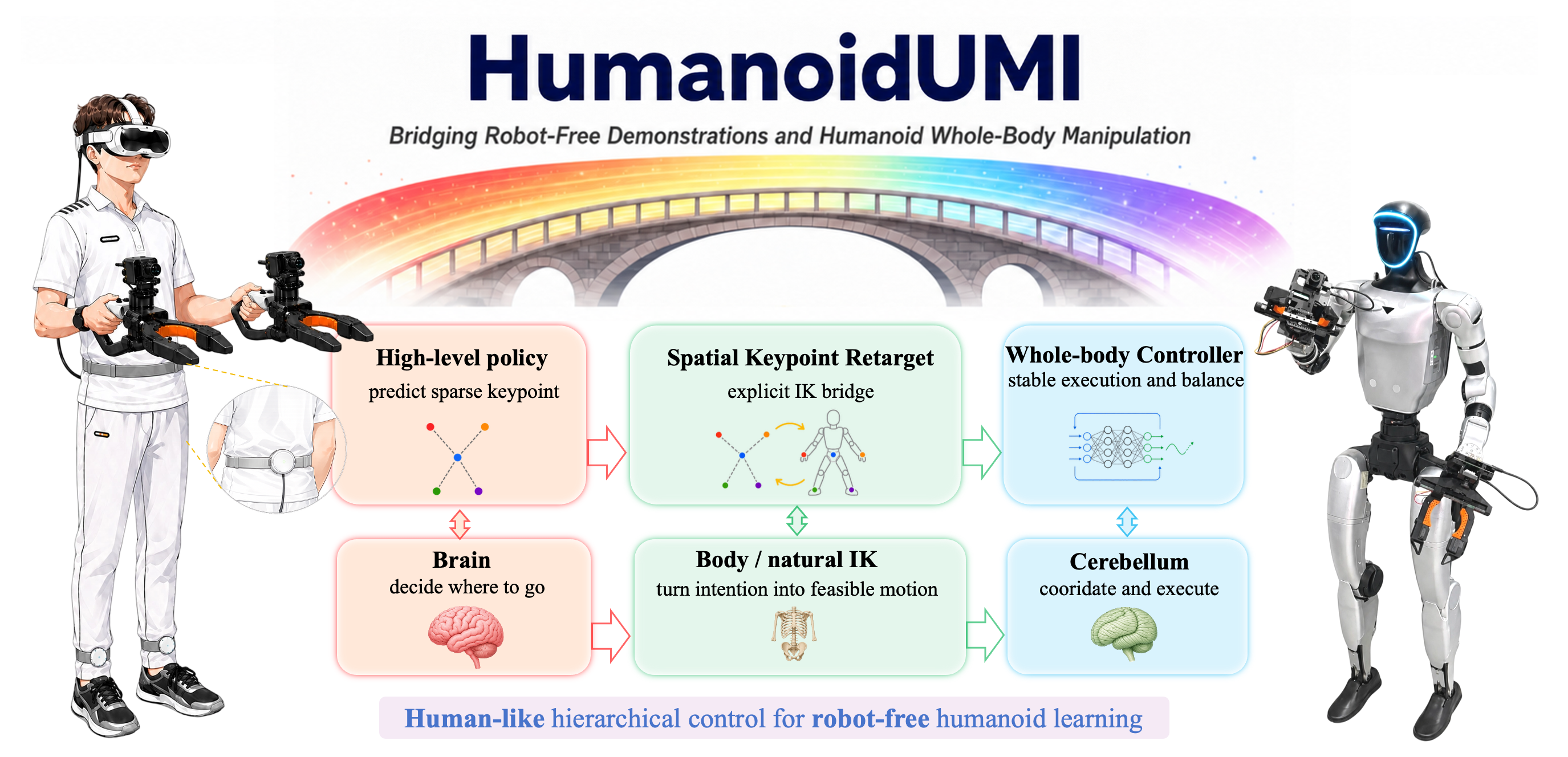
Overview of the full HumanoidUMI pipeline, from robot-free human demonstration capture to deployable humanoid whole-body execution.
Abstract
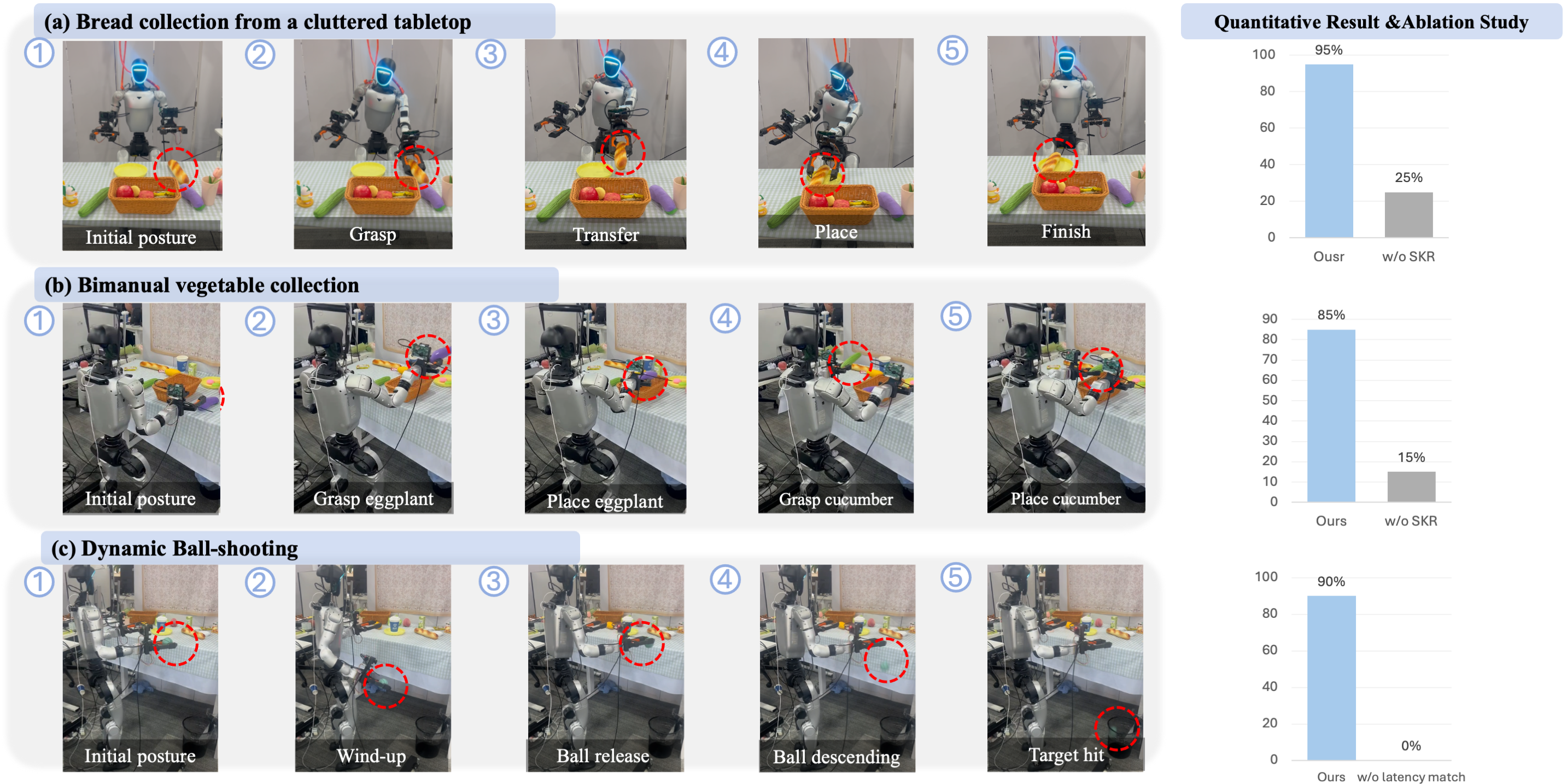
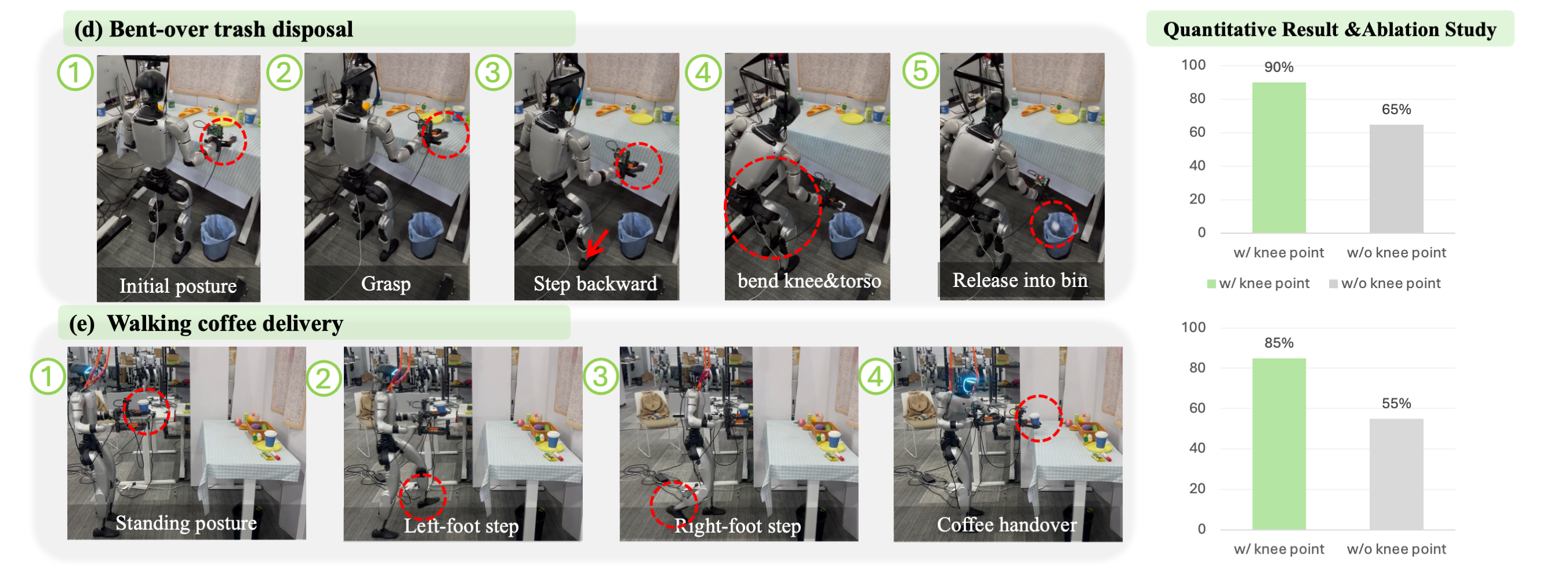
High-quality data collection is a fundamental cornerstone for training humanoid whole-body visuomotor policies. Current data acquisition paradigms predominantly rely on robot teleoperation, which is often hindered by limited hardware accessibility and low operational efficiency. Inspired by the Universal Manipulation Interface (UMI), we propose HumanoidUMI, a portable, efficient, and robot-free data collection framework tailored for humanoid robots. HumanoidUMI leverages lightweight VR devices to capture human demonstrations as sparse keypoint trajectories while simultaneously recording wrist-mounted visual data. These multimodal data are subsequently utilized to train a high-level policy network that predicts future keypoint trajectories conditioned on the captured visual features. Through a robust keypoint retargeting pipeline, keypoint trajectories are precisely mapped onto the robot's morphology and executed via a whole-body controller. This approach enables the seamless transfer of diverse and agile behaviors from natural human demonstrations to humanoid embodiments. We demonstrate the efficacy and versatility of the proposed framework across five real-world scenarios.